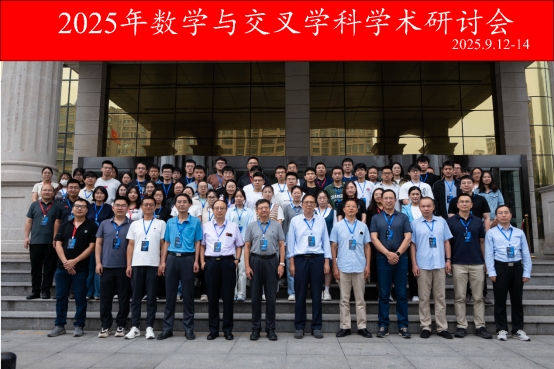
为推动数学学科与多领域的深度融合,探索交叉学科前沿研究方向,2025年9月12日至14日,PA视讯集团官网微分方程及其应用团队和非线性控制团队联合举办“2025年数学与交叉学科研讨会”。来自全国多所高校、科研院所的数学及交叉学科领域的百余位专家学者、师生代表齐聚一堂,共话学术前沿,共商学科发展新路径。研讨会旨在搭建交流平台,围绕“数学理论与工程应用深度融合”核心主题,集中探讨数学及交叉学科领域的最新研究进展。
会议于9月13日上午开幕,由PA视讯官方网站高犇副教授主持,北京大学刘才山教授作为特邀专家代表致辞。此次会议安排了十一场高水平学术报告,涵盖复杂系统建模、航天器动力学、非线性力学控制、液体晃动分析、分析力学等多个前沿方向。


北京大学刘才山教授以“自行车中的相关数学问题与智能自行车机器人”为题,揭示了自行车这一非线性非完整系统的自稳定行为、Counter-Steering反直觉控制等现象背后的数学机制,提出了智能自行车控制的可行性方案,为非线性系统的工程化应用提供了新思路;清华大学李俊峰教授剖析“双小行星系统构型多样性来源”,借助仿真揭示了小行星质量脱落物质的动力学演化规律,其研究成果为深空探测任务中小行星系统的精准分析提供了科学依据。


北京理工大学董春迎教授针对声固耦合计算的技术瓶颈,介绍了“等几何有限元-边界元方法”在汽车噪声优化、潜艇声隐身设计中的应用。该方法有效解决了传统数值方法几何离散误差大的问题,为工程领域的声固耦合问题提供了高效解决方案;北京理工大学岳宝增教授则围绕“充液航天器动力学与控制”,汇报了液体推进剂晃动、柔性附件振动对航天器姿态的影响及耦合动力学建模方法,其研究成果对我国载人登月、重型火箭研发具有重要支撑意义。


上海大学周进教授聚焦“复杂系统网络化动力学建模与控制”,分享了在无人车、飞行器等智能机器人系统群智协同控制中的研究进展,探讨了AI网络化结构对复杂系统控制的启发,为智能系统的协同控制技术发展提供了参考;内蒙古工业大学宋晓娟教授则针对充液航天器姿态控制难题,设计了基于滑模控制的复合策略,有效提升了航天器在外部干扰下的稳定性与鲁棒性,为航天器姿态控制技术的优化提供了新方案。

北京理工大学史东华副教授提出“非线性力学系统的曲率塑形控制受控Lagrange方法”,通过调整度量改变系统曲率,解决了非线性系统全局镇定难题,为几何力学控制研究开辟了新方向。广东医科大学王勇教授探索“非完整约束的几何意义及应用”,将高维位形空间约化为低维Riemann-Cartan空间,为非完整系统运动规划提供了新理论,为相关领域的理论研究与工程实践提供了重要支撑。

此次2025年数学与交叉学科研讨会的圆满召开,为数学领域与工程、航天、智能系统等领域的深度融合搭建了高效交流平台,不仅拓展了参会者的研究思路,更凝聚了推动交叉学科发展的共识。未来,PA视讯集团官网将继续发挥学科优势,持续举办高水平学术交流活动,为我国数学交叉学科的创新发展与人才培养贡献更多力量。
初审:闫玉龙
复审:李明涛
终审:杨卫华